









Adafruit N20 DC motor met magnetische encoder - 6V met gear ratio van 1:150
Beschrijving
De eerste stap in een roboticaproject is het laten draaien van een motor, waarbij snelheidsvariaties als gevolg van spanning, omgevings- en productieverschillen zichtbaar worden. Om de snelheid van de motor nauwkeurig te meten, kan een encoderwiel worden aangesloten, samen met een optische of magnetische teller. Deze combinatie stelt uw microcontroller in staat om het aantal passerende spaken te tellen en de snelheid efficiënt te bepalen.
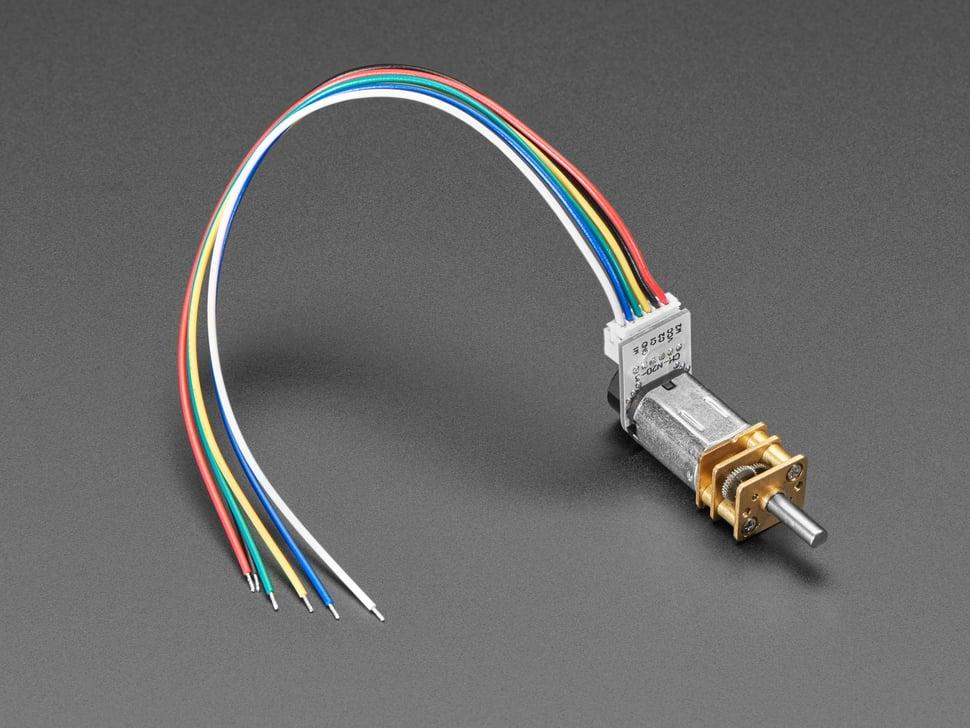
Verbeter uw opstelling door een tweede teller toe te voegen om zowel de richting als de snelheid te detecteren, en vereenvoudig het proces met onze speciaal ontworpen motor. Deze motor, niet alleen compact in de standaard N20-maat, maar ook uitgerust met een magnetisch wiel en twee vooraf bevestigde hall-effectsensoren, zorgt voor een naadloze integratie.
De motor werkt optimaal met een voeding van 4,5 tot 6 V DC via de witte en rode draden. Deze draden zijn aangesloten op uw motor driver en maken snelheidsregeling via PWM met een H-brug mogelijk. ground de blauwe draad aan op uw microcontroller, voorzie de zwarte draad van 3-5 V DC en lees de hall- outputs van de gele en green draden af voor nauwkeurige feedback.
Er is een voorbeeldschets beschikbaar voor Arduino , die aanpasbaar is aan andere programmeertalen en gebruikmaakt van interrupts op encoderpinnen om de snelheid te berekenen. Deze motor heeft een gear ratio 1:150, vereist een nominaal vermogen van 6 V en verbruikt ongeveer 100 mA, met een piek van 200 mA bij stilstand. De gear ratio past het koppel en toerental aan zonder de stroomopname te beïnvloeden, wat veelzijdigheid in toepassingen biedt.
Eigenschappen
| Merk | Adafruit |
| Model | 4640 |
Geen ETA bekend
 Adafruit N20 DC motor met magnetische encoder - 6V met gear ratio van 1:150 € 15,50
Adafruit N20 DC motor met magnetische encoder - 6V met gear ratio van 1:150 € 15,50 Vragen en antwoorden
Klant ervaringen
Meer van het merk Adafruit
- Op voorraad Adafruit Witte LED-achtergrondverlichtingsmodule - medium 23 mm x 75 mm € 3,25 Bekijk product
- Op voorraad Adafruit Waterdichte DC-voedingskabelset - 5,5 / 2,1 mm € 3,25 Bekijk product
- Op voorraad Adafruit breadboard -vriendelijke SPDT-schuifschakelaar € 1,25 Bekijk product
- Op voorraad Adafruit Kleine ingesloten piëzo met draden € 1,25 Bekijk product
- Op voorraad Adafruit Mini metalen luidspreker met draden - 8 ohm 0,5W € 2,50 Bekijk product
- Op voorraad Adafruit JST PH 2-pins kabel – male header 200 mm € 1,- Bekijk product
- Op voorraad Adafruit Bundel van kleine krokodillenklem naar male jumper - 6 stuks € 6,40 Bekijk product
- Op voorraad Adafruit NOODs - Flexibel LED Filament - 3V - 300mm - Lime Groen € 8,75 Bekijk product
- Op voorraad Adafruit NOODs - Flexibele LED Filament - 3V - 300mm - Warm wit € 5,75 Bekijk product
- Op voorraad Adafruit Geweven geleidende stof - 20 cm vierkant € 6,25 Bekijk product
- Op voorraad Adafruit Enkelzijdige nOOds - 128 mm lange flexibele LED-gloeidraad - Blauw 3V € 5,- Bekijk product
- Op voorraad Adafruit Micro Lipo - USB LiIon / LiPoly-oplader € 7,50 Bekijk product
- 5 stuks Op voorraad Adafruit NeoPixel Diffuus 5mm Through-Hole LED's - 5 stuks € 6,25 Bekijk product
- Op voorraad Adafruit Stereo ingesloten luidsprekerset - 3W 4 Ohm € 9,25 Bekijk product
- Op voorraad Adafruit bq25185 USB / DC / Zonnelader met 3,3V Buck board € 11,25 Bekijk product
Laatst bekeken
- Adafruit N20 DC motor met magnetische encoder - 6V met gear ratio van 1:150 € 15,50 Bekijk product
- Op voorraad Velleman Supercondensator, 10.000 µF - 50V - 1 stuk € 9,25 Bekijk product
- Adafruit Toroid-sleepring - 2,1" OD 1/2" ID, 6 draden, max. 240V @ 5A € 123,25 Bekijk product
- Adafruit SMT breakout PCB voor SOIC-12 of TSSOP-12 - 6-pack! € 6,25 Bekijk product
- Adafruit 75mm staven - 12V digitale RGB LED-pixels (streng van 21) € 61,50 Bekijk product
- Adafruit PLA-filament voor 3D-printers - 3 mm diameter - Blauw - 1 kg € 56,50 Bekijk product
- Adafruit Oranje en helder TT-motorwiel voor TT DC- gearbox € 2,- Bekijk product
- Adafruit HTU21D board F Temperatuur- en vochtigheidssensor sensor breakout € 19,75 Bekijk product
- Adafruit AdaBox015 - KOM NAAR UW SENSOREN € 86,- Bekijk product
- Adafruit 13,56 MHz RFID/NFC-kaart - NTAG213-chip € 3,75 Bekijk product
- Adafruit Micro B USB connectoren - verpakking van 5 € 3,75 Bekijk product
- Adafruit Ultra flexibele witte LED-strip - 480 LED's per meter - 1 m lang - € 14,75 Bekijk product
- Adafruit 4x4 Trellis feather acryl behuizing + hardware kit € 18,50 Bekijk product
- Adafruit Single-Ended Flexibele LED Gloeidraad - 3V 25mm lang - Koel Wit € 3,75 Bekijk product
- Adafruit Volwassen PM2.5 Filterend Gezichtsmasker met 4 Filterinzetten - Zwart € 12,25 Bekijk product