









Pololu afstandssensor met pulsbreedte output , 300cm Max
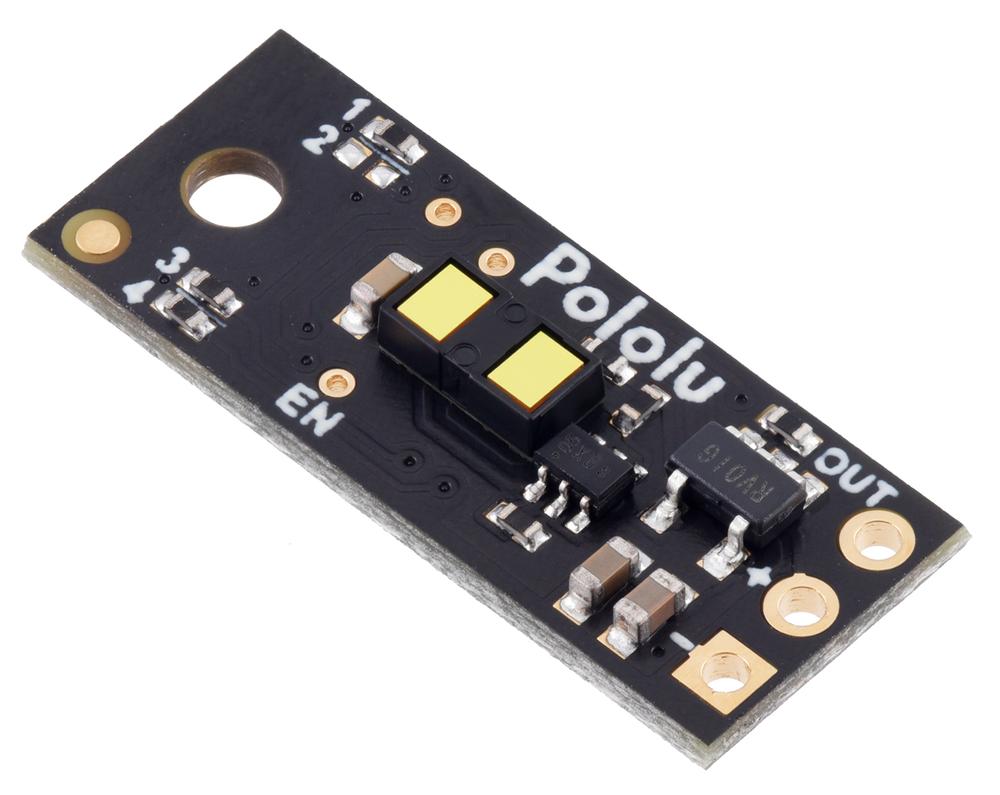
Beschrijving
Deze kleine op lidar gebaseerde afstandssensor rapporteert de afstand van objecten tot ongeveer 300 cm (120″) met een gepulseerd signaal dat lijkt op een hobby-servobesturingssignaal.
Een digitale microcontroller-pin kan worden gebruikt om de lengte van elke hoge puls te timen, die de gemeten afstand codeert. De sensor werkt met een ingangsspanningsbereik van 3,0 V tot 5,5 V, en de pinafstand van 0,1″ maakt hem gemakkelijk te gebruiken met standaard soldeerloze breadboards en 0,1″ perfboards.
Opmerking: het maximale bereik van 300 cm is alleen haalbaar voor sterk reflecterende objecten bij goede omgevingsomstandigheden. Doelen met een lagere reflectiviteit of slechte omgevingsomstandigheden verminderen het maximale bereik.
Deze compacte sensor maakt het mogelijk om de afstand van objecten tot ongeveer 300 cm (120″) te meten met behulp van een eenvoudige digitale pulsbreedte-interface (vergelijkbaar met een hobby-servobesturingssignaal). Het maakt gebruik van een lidar-module met een kort bereik om precies te meten hoe lang het duurt voordat uitgezonden pulsen van infrarood, oogveilig laserlicht het dichtstbijzijnde object bereiken en worden teruggekaatst, waardoor een resolutie van 2 mm mogelijk is. Zolang de sensor is ingeschakeld, worden er continue afstandsmetingen uitgevoerd en worden de bereiken gecodeerd als de breedten van hoge pulsen, die vervolgens kunnen worden getimed door een microcontroller met behulp van een enkele digitale ingang.
Specificaties
- operating voltage : 3,0 V tot 5,5 V
- Stroomverbruik: 30 mA (typisch) indien ingeschakeld, 0,4 mA indien uitgeschakeld
- Maximaal bereik: ongeveer 300 cm (120″) (voor doelen met een hoge reflectie in goede omgevingsomstandigheden; doelen met een lagere reflectie of slechte omgevingsomstandigheden verkleinen het maximale detectiebereik)
- Minimum bereik: 4 cm (voor nauwkeurige meting); < 1 mm (voor detectie)
- Updatesnelheid: 30 Hz tot 33 Hz (periode van 33 ms tot 30 ms)
- Gezichtsveld (FOV): 15° typisch; kan variëren met objectreflectie en omgevingsomstandigheden
- output : digitale pulsbreedte
- Afmetingen: 0,85″ × 0,35″ × 0,136″ (21,6 × 8,9 × 3,5 mm)
- Gewicht: 0,4 g
Belangrijke notitie:
Dit product wordt mogelijk geleverd met een beschermende voering die de sensor-IC bedekt. De voering moet worden verwijderd voor een goede detectieprestatie.
Eigenschappen
| Merk | Pololu |
| Model | 4079 |
Levertijd 5 tot 7 werkdagen
 Pololu afstandssensor met pulsbreedte output , 300cm Max Geleverd in 5 tot 7 dagen € 32,25
Pololu afstandssensor met pulsbreedte output , 300cm Max Geleverd in 5 tot 7 dagen € 32,25 Soortgelijke producten
- Pololu Digitale Afstandssensor 10cm € 28,30 Bekijk product
- Pololu afstandssensor met pulsbreedte- output , 130 cm Max € 32,25 Bekijk product
- Pololu Platte digitale afstandssensor 15cm € 28,30 Bekijk product
- Pololu Digitale Afstandssensor 50cm € 32,25 Bekijk product
- Pololu afstandssensor met pulsbreedte- output , 50 cm Max € 28,30 Bekijk product
- Pololu Digitale Afstandssensor 200cm € 32,25 Bekijk product
- Pololu Digitale Afstandssensor 5cm € 28,30 Bekijk product
- Pololu Digitale Afstandssensor 100cm € 32,25 Bekijk product
- Pololu Digitale Afstandssensor 25cm € 32,25 Bekijk product
Vragen en antwoorden
Klant ervaringen
Meer van het merk Pololu
- Afgeprijsd Op voorraad -50 % Pololu 3,3V Step-Up Spanning regelaar U1V10F3 € 9,70 € 4,85 Bekijk product
- Afgeprijsd Op voorraad -50 % Pololu 3.3V Step-Up Spanningsregelaar U1V11F3 € 11,05 € 5,55 Bekijk product
- Afgeprijsd Op voorraad -50 % Pololu 5V trapsgewijze spanningsregelaar U3V16F5 € 9,70 € 4,85 Bekijk product
- Afgeprijsd Op voorraad -50 % Pololu Lintkabel Premium jumper wires 10-kleuren FF 6" (15 cm) € 4,- € 2,- Bekijk product
- Afgeprijsd 3 stuks Op voorraad -49 % Pololu Terminal 3-Pin, 2.54mm, Zij-ingang - 3 stuks € 3,55 € 1,80 Bekijk product
- Afgeprijsd Op voorraad -50 % Pololu stranded draad: rood, 28 AWG, 90 voet € 13,85 € 6,95 Bekijk product
- Afgeprijsd Op voorraad -50 % Pololu 3,3V, 500mA Step-Down Voltage Regulator D24V5F3 € 12,45 € 6,25 Bekijk product
- Afgeprijsd 5 stuks Op voorraad -50 % Pololu Mini Schakelaar: PCB-Mount, 2-Pin, SPST, 50mA (5-Pack) € 2,90 € 1,45 Bekijk product
- Afgeprijsd Op voorraad -50 % Pololu Mini-schuifschakelaar: 3-pins, SPDT, 0,3A (3-pack) € 3,30 € 1,65 Bekijk product
- Afgeprijsd Op voorraad -50 % Pololu stranded draad: geel, 26 AWG, 70 voet € 13,85 € 6,95 Bekijk product
- Afgeprijsd Op voorraad -50 % Pololu stranded draad: blauw, 26 AWG, 70 voet € 13,85 € 6,95 Bekijk product
- Afgeprijsd Op voorraad -48 % Pololu 0,100" (2,54 mm) Breakaway male header : 1×40-pins, recht, wit € 1,55 € 0,80 Bekijk product
- Afgeprijsd Op voorraad -50 % Pololu wiel 32×7 mm paar - wit € 6,20 € 3,10 Bekijk product
- Afgeprijsd Op voorraad -50 % Pololu Flexibel koperdraad op spoel - wit - 20 AWG / 0,52 mm² - 12 meter € 16,65 € 8,30 Bekijk product
- Afgeprijsd Op voorraad -50 % Pololu 9V, 1A Step-Down Voltage Regulator D24V10F9 € 18,- € 9,- Bekijk product