









Pololu Dual G2 High-Power motor driver 18v18 voor raspberry pi (geassembleerd)
Beschrijving Links Bijlagen
Dit board maakt het eenvoudig om twee krachtige DC motors met een raspberry pi aan te sturen. De dubbele discrete MOSFET H-bruggen ondersteunen een breed werkbereik van 6,5 V tot 30 V en zijn efficiënt genoeg om continu 18 A te leveren zonder koellichaam. De drivers bieden basisfunctionaliteit voor stroombegrenzing en ze accepteren ultrasone PWM-frequenties voor een stillere werking. De standaard pintoewijzingen maken het gemakkelijk om aan de slag te gaan, maar ze kunnen worden aangepast voor meer gespecialiseerde toepassingen. Deze versie wordt volledig geassembleerd geleverd met ingesoldeerde connectoren.
De minimale operating voltage voor alle vier de versies is 6,5 V, terwijl de maximale bedrijfsspanningen in bovenstaande tabel staan vermeld. Het board bevat ook een geïntegreerde 5 V, 2,5 A schakelende step-down regelaar die kan worden gebruikt om de raspberry pi waarop hij is aangesloten van stroom te voorzien, waardoor bediening vanaf een enkele voeding mogelijk is.
De standaardconfiguratie van de driver gebruikt zes GPIO-pinnen om de motordrivers te besturen, waarbij gebruik wordt gemaakt van de hardware-PWM- outputs van de raspberry pi , en er worden twee extra pinnen gebruikt om de outputs van de drivers drivers lezen. De pintoewijzingen kunnen echter worden aangepast als de standaardinstellingen niet handig zijn, en pinnen voor stroomdetectie en -begrenzing zijn toegankelijk op het board voor meer geavanceerde toepassingen.
Het board komt overeen met de mechanische specificatie van de raspberry pi hat (Hardware Attached on Top), hoewel het niet voldoet aan de full hat specificaties vanwege het ontbreken van een ID-EEPROM. (Een voetafdruk voor het toevoegen van uw eigen EEPROM is beschikbaar voor toepassingen waar dit nuttig zou zijn; pull-ups op SDA, SCL en WP zijn aanwezig.) Het is niet praktisch om dit uitbreidingsbord board gebruiken met de originele raspberry pi Model A of Model B vanwege verschillen in hun pinout en vormfactor.
Deze dual motor drivers zijn ook verkrijgbaar als Arduino shields . Overweeg onze High-Power Motor- drivers voor versies met één kanaal in een compactere vormfactor. Voor kleinere, minder krachtige en goedkopere alternatieven die zijn ontworpen voor een raspberry pi , overweeg dan onze Dual MC33926 motor driver voor raspberry pi , Dual MAX14870 motor driver voor raspberry pi en DRV8835 Dual motor driver voor raspberry pi .
Functies die alle versies gemeen hebben
- PWM-werking tot 100 kHz
- Motorindicator-LED's geven aan wat de outputs doen, zelfs als er geen motor is aangesloten
- Geïntegreerde 5 V, 2,5 A schakelende step-down spanningsregelaar voedt de raspberry pi -basis voor werking met één voeding
- Python- library maakt het gemakkelijk om aan de slag te gaan met dit board als uitbreidingsbord voor board motor driver
- GPIO-pintoewijzingen kunnen worden aangepast als de standaardtoewijzingen niet handig zijn
- Stroomdetectie- en begrenzingspennen zijn zichtbaar voor geavanceerd gebruik
- Beveiliging tegen omgekeerde spanning
- Uitschakeling bij onderspanning
- Kortsluitingsbeveiliging
Details voor dit item #3751
- operating voltage : 6,5 V tot 30 V (absoluut maximum; niet bedoeld voor gebruik met 24 V batterijen)
- output : 18 A continu
- Actieve stroombegrenzing (chopping) met geschatte standaarddrempel van 50 A (kan lager worden aangepast)
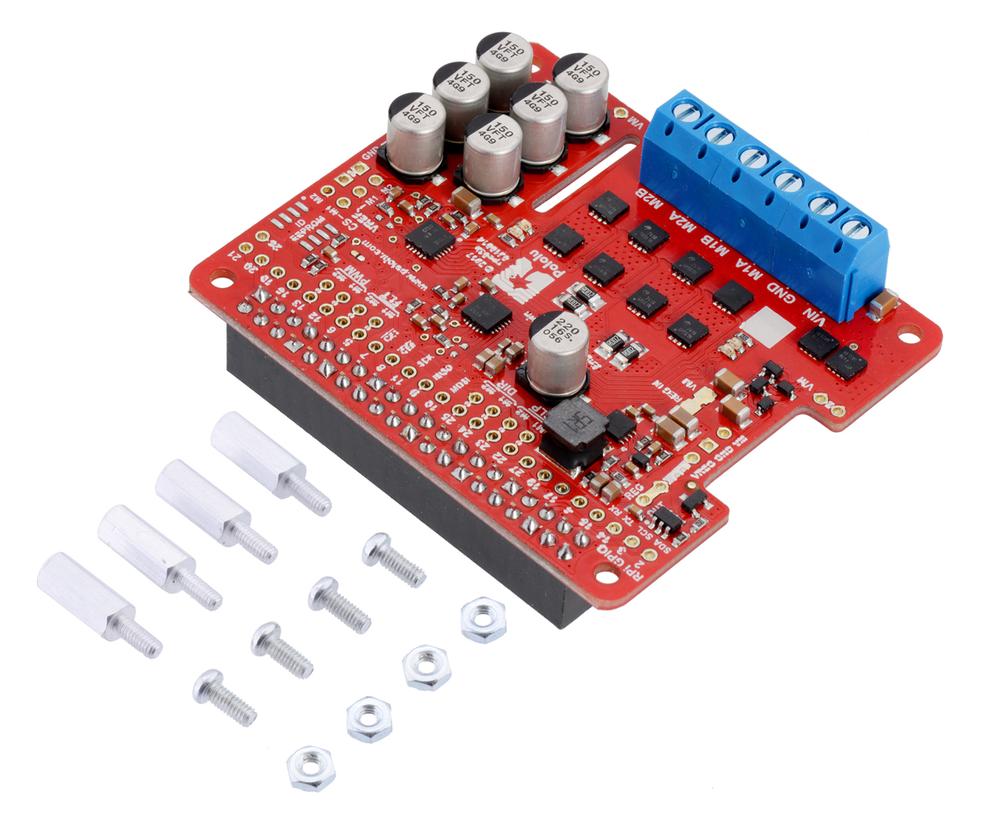
Deze versie van de 18v18 motor driver is volledig samengesteld, met een 2 × 20-pins 0,1 " female header (voor de raspberry pi -interface) en een zespins strip van 5 mm terminal blocks (voor board en outputs ) gesoldeerd. Het kan worden onderscheiden van de andere versies door zijn rood Printplaat en het nummer 150 bovenop de zes hoge zilveren elektrolytische condensatoren op de hoek van het board . (Zie item #3750 voor een kitversie met connectoren inbegrepen maar niet gesoldeerd.)
Vier M2.5-afstandhouders (11 mm lengte), schroeven en moeren worden meegeleverd om het board op de juiste hoogte voor de GPIO-connector aan de raspberry pi te bevestigen.
Shorting-blokken en 0,1″ male headers (niet inbegrepen) kunnen worden gebruikt om enkele van de meer geavanceerde optionele wijzigingen aan het board aan te brengen, zoals het opnieuw toewijzen van de controlepennen.
De motor driver bevat zes 100 μF of 150 μF elektrolytische vermogenscondensatoren en er is ruimte om extra condensatoren toe te voegen (bijv. om lange voedingsdraden te compenseren of de stabiliteit van de voeding te vergroten). Extra vermogenscondensatoren zijn meestal niet nodig en er worden geen extra condensatoren meegeleverd met deze motor driver .
Een raspberry pi is niet inbegrepen.
Stroom
Een geschikte motorvoeding moet worden aangesloten op de grote VIN- en GND-pads van de motor driver . Het board bevat een beveiligingscircuit tegen omgekeerde spanning dat schade helpt voorkomen case de motorvoeding achterwaarts wordt aangesloten. De omgekeerde beveiligde ingangsspanning is toegankelijk voor gebruik in andere circuits via de twee pinnen met het label VM aan de linkerkant van het board . Standaard voedt de motorvoeding ook een 5 V, 2,5 A schakelende step-down regelaar die de aangesloten raspberry pi van stroom voorziet.
Een ideaal board op dit board voorkomt dat tegenstroom in de 5 V-voeding van het motor driver stroomt als de raspberry pi afzonderlijk wordt gevoed (bijvoorbeeld via de USB-voedingsaansluiting). Echter, te beginnen met de raspberry pi 3 Model B+, is er geen overeenkomstig ideaal diodecircuit op de USB-voedingsingang van de raspberry pi , dus het is mogelijk voor board driver om een USB-voedingsadapter terug te voeren via de raspberry pi . Daarom raden we af om externe USB-voeding op de raspberry pi aan te sluiten terwijl deze wordt gevoed via de motor driver .
Backfeeding is geen probleem met oudere raspberry pi -versies, die wel een diodecircuit op de USB-voedingsingang hebben. Met raspberry pi -versies voorafgaand aan de Pi 3 B+, is het veilig om een andere voeding op de raspberry pi aan te sluiten via de USB-aansluiting terwijl de motor driver is aangesloten en van stroom wordt voorzien.
Als je de raspberry pi afzonderlijk van stroom wilt voorzien, kan de regelaar worden losgekoppeld door twee zichtbare sporen op het board door te knippen: een tussen de op het oppervlak gemonteerde pads met het label "VM" en "REG IN", en een andere tussen de twee pinnen bij de " REG OUT”-label, zoals rechts afgebeeld. Op de 24v14- en 24v18-versies verhoogt het loskoppelen van de regelaar de absolute maximale operating voltage van het board tot 40 V.
Opties voor motorbesturing
Als de PWM-pin laag wordt gehouden, worden beide outputs laag gehouden (remwerking). Met PWM hoog, worden de outputs aangestuurd volgens de DIR-ingang. Dit maakt twee werkingsmodi mogelijk: tekenmagnitude, waarbij de PWM-werkcyclus de snelheid van de motor regelt en DIR de richting regelt, en vergrendelde antifase, waarbij een pulsbreedte-gemoduleerd signaal wordt toegepast op de DIR-pin met PWM hield hoog.
Bij werking met vergrendelde tegenfase drijft een lage inschakelduur de motor in de ene richting aan en een hoge inschakelduur drijft de motor in de andere richting aan; een inschakelduur van 50% schakelt de motor uit. Een succesvolle implementatie van vergrendelde antifase hangt af van de motorinductantie en schakelfrequentie die de stroom afvlakken (bijv. de stroom zero maken in het case van 50% inschakelduur), dus een hoge PWM-frequentie kan nodig zijn.
PWM-frequentie
De motor driver ondersteunt PWM-frequenties tot 100 kHz, maar houd er rekening mee dat schakelverliezen in de driver evenredig zijn met de PWM-frequentie. Doorgaans is rond de 20 kHz een goede keuze voor werking met een tekenomvang, omdat deze hoog genoeg is om ultrasoon te zijn, wat resulteert in een stillere werking.
Een puls op de PWM-pin moet hoog zijn gedurende een minimale duur van ongeveer 0,5 µs voordat de outputs worden ingeschakeld voor de overeenkomstige duur (elke kortere ingangspuls veroorzaakt geen verandering op de outputs ), dus lage duty cycles zijn niet beschikbaar bij hoge frequenties . Bij 100 kHz is de pulsperiode bijvoorbeeld 10 µs, en de minimaal haalbare duty cycle die niet gelijk is aan zero is 0,5/10 of 5%.
Foutcondities
De motor driver kan verschillende fouttoestanden detecteren die hij rapporteert door de FLT-pin laag te zetten; dit is een open-drain- output die moet worden opgetrokken tot de logische spanning van uw systeem. De detecteerbare fouten omvatten kortsluitingen op de outputs , onderspanning en oververhitting. Alle fouten schakelen de outputs maar zijn niet vergrendeld, wat betekent dat de driver zal proberen de werking te hervatten wanneer de foutconditie is opgeheven (of na een vertraging van enkele milliseconden in het case van de kortsluitingsfout). De oververhittingsfout geeft een zwakke indicatie dat het board te heet is, maar geeft niet direct de temperatuur van de MOSFET's aan, die meestal de eerste componenten zijn die oververhit raken. Reken dus niet op deze fout om schade door oververhitting te voorkomen. -temperatuur omstandigheden.
Pinnen opnieuw toewijzen
Alle GPIO-pinnen van de raspberry pi zijn broken out langs een rij genummerde doorlopende gaten net onder de 40-pins GPIO-connector. Elke GPIO-pin die door het board wordt gebruikt, is vanaf deze rij verbonden met de overeenkomstige motor driver door een spoor aan de bovenzijde van het board dat het paar gaten overspant. Als je een van deze motor driver opnieuw wilt toewijzen, kun je het spoor met een mes doorsnijden en vervolgens een draad van het onderste gat naar een nieuwe GPIO-pen leiden.
Merk op dat de standaard pin-toewijzingen zo zijn gekozen dat de standaard GPIO-pull-ups en pull-downs van de raspberry pi overeenkomen met de richting waarin de motor driver worden of moeten worden getrokken (omhoog voor SF, omlaag voor andere); als u de pinnen van de motor driver opnieuw toewijst zonder hier aandacht aan te besteden, kunt u problemen ondervinden waarbij pinnen in de verkeerde richting worden getrokken. Zie de raspberry pi documentatie voor meer informatie over de standaard GPIO-statussen.
Stroomdetectie en -begrenzing
De motor driver legt stroomdetectie- en begrenzingspennen bloot die niet zijn verbonden met de raspberry pi , maar ze zijn toegankelijk via hun eigen doorlopende gaten voor het case u ze in een meer geavanceerde toepassing wilt gebruiken.
De driver heeft de mogelijkheid om de motorstroom te beperken door middel van stroomafsnijding: zodra de stroom van de motoraandrijving een ingestelde drempelwaarde bereikt, gaat de driver gedurende ongeveer 25 μs in de remmodus (langzaam wegsterven) alvorens weer stroom toe te passen om de motor aan te drijven. Dit maakt het praktischer om de driver te gebruiken met een motor die tijdens het draaien misschien maar een paar ampère trekt, maar bij het starten vele malen zoveel (tientallen ampère) kan trekken.
Op dit board (18v18) is de nominale stroombegrenzingsdrempel standaard ingesteld op ongeveer 50 A. Voor elk motorkanaal kunt u de limiet verlagen door een extra weerstand aan te sluiten tussen de VREF-pin en de aangrenzende GND-pin; de onderstaande grafiek laat zien hoe de stroomlimiet zich verhoudt tot de VREF-weerstandswaarde. Als u bijvoorbeeld een weerstand van 100 kΩ tussen VREF en GND toevoegt, wordt de stroomlimiet verlaagd tot ongeveer 29 A. Merk op dat de stroombegrenzingsdrempel niet erg nauwkeurig is en minder nauwkeurig is bij bijzonder lage instellingen (aangegeven door het gestreepte gedeelte van de curve) .
De stroomwaarnemingspennen van de driver , met het label CS, output die evenredig zijn met de motorstromen terwijl de H-bruggen aan het rijden zijn. De output voor deze versie is ongeveer 20 mV/A plus een kleine offset, die typisch ongeveer 50 mV is.
Elke CS output is alleen actief als de bijbehorende H-brug in aandrijfmodus staat; het is inactief (laag) wanneer het kanaal in de remmodus staat (langzaam verval), wat gebeurt wanneer de PWM-ingang laag is of wanneer stroombegrenzing actief is. De stroom zal door de motor blijven circuleren wanneer de driver begint te remmen, maar de spanning op de CS-pin zal de motorstroom in de remmodus niet nauwkeurig weergeven. De CS-spanning wordt intern gebruikt door de motor driver , dus om interferentie met de werking van de driver te voorkomen, mag u geen condensator op deze pin aansluiten of een belasting aansluiten die er meer dan een paar mA uit trekt.
Overwegingen voor energiedissipatie in de echte wereld
De MOSFET's kunnen gedurende korte tijd grote stroompieken aan (bijv. 100 A gedurende enkele milliseconden), en de stroomafsnijding van de driver houdt de gemiddelde stroom onder de ingestelde limiet. De piekwaarden zijn voor snelle transiënten (bijv. wanneer een motor voor het eerst wordt ingeschakeld), en de continue belasting is afhankelijk van verschillende omstandigheden, zoals de omgevingstemperatuur. PWMing van de motor zal extra verwarming introduceren die evenredig is met de frequentie. De daadwerkelijke stroom die u kunt leveren, hangt af van hoe goed u de motor driver koel kunt houden. De board van de driver is ontworpen om warmte uit de MOSFET's te halen, maar de prestaties kunnen worden verbeterd door een koellichaam of luchtstroom toe te voegen. Voor installaties met een hoge stroomsterkte moeten de motor- en voedingskabels ook direct worden gesoldeerd in plaats van door de meegeleverde terminal blocks te gaan, die geschikt zijn voor maximaal 16 A.
Waarschuwing: Deze motor driver heeft geen oververhittingsbeveiliging. Een te hoge temperatuur of te hoge stroom kan veroorzaken permanente schade aan de motor driver . U kunt overwegen om de geïntegreerde stroomdetectie output van de driver (met een externe ADC) of een externe stroomsensor te gebruiken om uw stroomverbruik te controleren.
Eigenschappen
| Merk | Pololu |
| Model | 3751 |
Levertijd 5 tot 14 werkdagen
 Pololu Dual G2 High-Power motor driver 18v18 voor raspberry pi (geassembleerd) € 95,35
Pololu Dual G2 High-Power motor driver 18v18 voor raspberry pi (geassembleerd) € 95,35 Soortgelijke producten
- Pololu Dual G2 High-Power motor driver 18v18 voor Raspberry Pi (gedeeltelijke kit) € 88,95 Bekijk product
- Pololu Jrk G2 18v19 USB-motorcontroller met feedback € 139,85 Bekijk product
- Pololu Krachtige eenvoudige motorcontroller G2 18v15 (connectoren gesoldeerd) € 179,70 Bekijk product
- Pololu Dual G2 High-Power motor driver 24v14 voor raspberry pi (Gedeeltelijke kit) € 95,35 Bekijk product
- Pololu G2 High-Power Motor Driver 24v13 € 57,25 Bekijk product
- Pololu Dual G2 High-Power motor driver 24v14 shield voor Arduino € 101,70 Bekijk product
- Pololu Krachtige eenvoudige motorcontroller G2 24v19 € 210,15 Bekijk product
- Pololu Dual G2 High-Power Motor Driver 24v18 Shield voor Arduino (Partial Kit) € 120,75 Bekijk product
- Pololu G2 High-Power Motor Driver 24v21 € 72,50 Bekijk product
- Pololu Dual G2 High-Power motor driver 24v14 voor Raspberry Pi (gemonteerd) € 101,70 Bekijk product
- Pololu Jrk G2 24v13 USB-motorcontroller met feedback € 139,85 Bekijk product
- Pololu Krachtige eenvoudige motorcontroller G2 18v15 € 171,70 Bekijk product
- Pololu Jrk G2 24v21 USB-motorcontroller met feedback € 190,70 Bekijk product
- Pololu G2 High-Power Motor Driver 18v17 € 57,25 Bekijk product
- Pololu Krachtige eenvoudige motorcontroller G2 24v12 (connectoren gesoldeerd) € 179,55 Bekijk product
- Pololu Krachtige eenvoudige motorcontroller G2 18v25 € 210,15 Bekijk product
- Pololu Dual G2 High-Power Motor Driver 18v18 Shield voor Arduino € 95,35 Bekijk product
- Pololu Dual G2 High-Power Motor Driver 24v18 Shield voor Arduino € 133,50 Bekijk product
- Pololu Dual G2 High-Power motor driver 18v22 voor Raspberry Pi (gedeeltelijke kit) € 120,85 Bekijk product
- Pololu Jrk G2 21v3 USB Motor Controller with Feedback (Connectors Soldered) € 72,45 Bekijk product
- Pololu Dual G2 High-Power Motor Driver 18v22 Shield voor Arduino € 133,50 Bekijk product
- Pololu Krachtige eenvoudige motorcontroller G2 24v12 € 171,70 Bekijk product
- Pololu Jrk G2 18v27 USB-motorcontroller met feedback € 190,70 Bekijk product
- Pololu G2 High-Power Motor Driver 18v25 € 72,45 Bekijk product
Vragen en antwoorden
Klant ervaringen
Meer van het merk Pololu
- Afgeprijsd Op voorraad -40 % Pololu DRV8838 Brushed DC Motor Driver € 6,30 € 3,80 Bekijk product
- Afgeprijsd Op voorraad -40 % Pololu stranded draad: rood, 28 AWG, 90 voet € 12,65 € 7,60 Bekijk product
- Afgeprijsd Op voorraad -39 % Pololu 4-Kanaals Bidirectionele Logic Level Shifter € 4,45 € 2,70 Bekijk product
- Afgeprijsd Op voorraad -40 % Pololu 5V, 500mA Step-Down Voltage Regulator D24V5F5 € 11,40 € 6,85 Bekijk product
- Afgeprijsd Op voorraad -40 % Pololu 5V, 600mA Step-Down Voltage Regulator D36V6F5 € 7,60 € 4,55 Bekijk product
- Afgeprijsd Op voorraad -40 % Pololu 3,3V, 500mA Step-Down Voltage Regulator D24V5F3 € 11,40 € 6,85 Bekijk product
- Afgeprijsd Op voorraad -40 % Pololu Mini MOSFET-schuifschakelaar met omgekeerde spanningsbeveiliging, LV € 5,75 € 3,45 Bekijk product
- Afgeprijsd Op voorraad -40 % Pololu 5V, 2A Step-up/step-down spanningsregelaar S13V20F5 € 22,85 € 13,75 Bekijk product
- Afgeprijsd Op voorraad -40 % Pololu stranded draad: wit, 22 AWG, 50 voet € 13,95 € 8,35 Bekijk product
- Afgeprijsd Op voorraad -39 % Pololu 0,100" (2,54 mm) Breakaway male header : 1×40-pins, recht, wit € 1,40 € 0,85 Bekijk product
- Afgeprijsd Op voorraad -40 % Pololu 5V, 3,4A spanningsregelaar D30V30F5 € 25,40 € 15,25 Bekijk product
- Afgeprijsd Op voorraad -40 % Pololu Flexibel koperdraad op spoel - wit - 20 AWG / 0,52 mm² - 12 meter € 15,20 € 9,15 Bekijk product
- Deal Op voorraad -68 % Pololu 4 AA-batterijhouder, rug aan rug € 3,80 € 1,20 Bekijk product
- Afgeprijsd Op voorraad -39 % Pololu Limiet schakelaar - 16,3mm arm met roller, 3-pin, SPDT, 5A € 3,20 € 1,95 Bekijk product
- Afgeprijsd Op voorraad -40 % Pololu 9V, 500mA Step-Down Voltage Regulator D24V5F9 € 11,40 € 6,85 Bekijk product